Maddux is a flexible robot manipulator simulation environment written in pure Python. It was created to make it easy to experiment with different learning algorithms to have a robot arm perform various tasks. Maddux was written by me and Colin Kohler as part of our final project for Robert Platt’s Robotics Course.
Maddux Supports
- Arbitrary Length Arms
- Forward Kinematics
- Inverse Kinematics
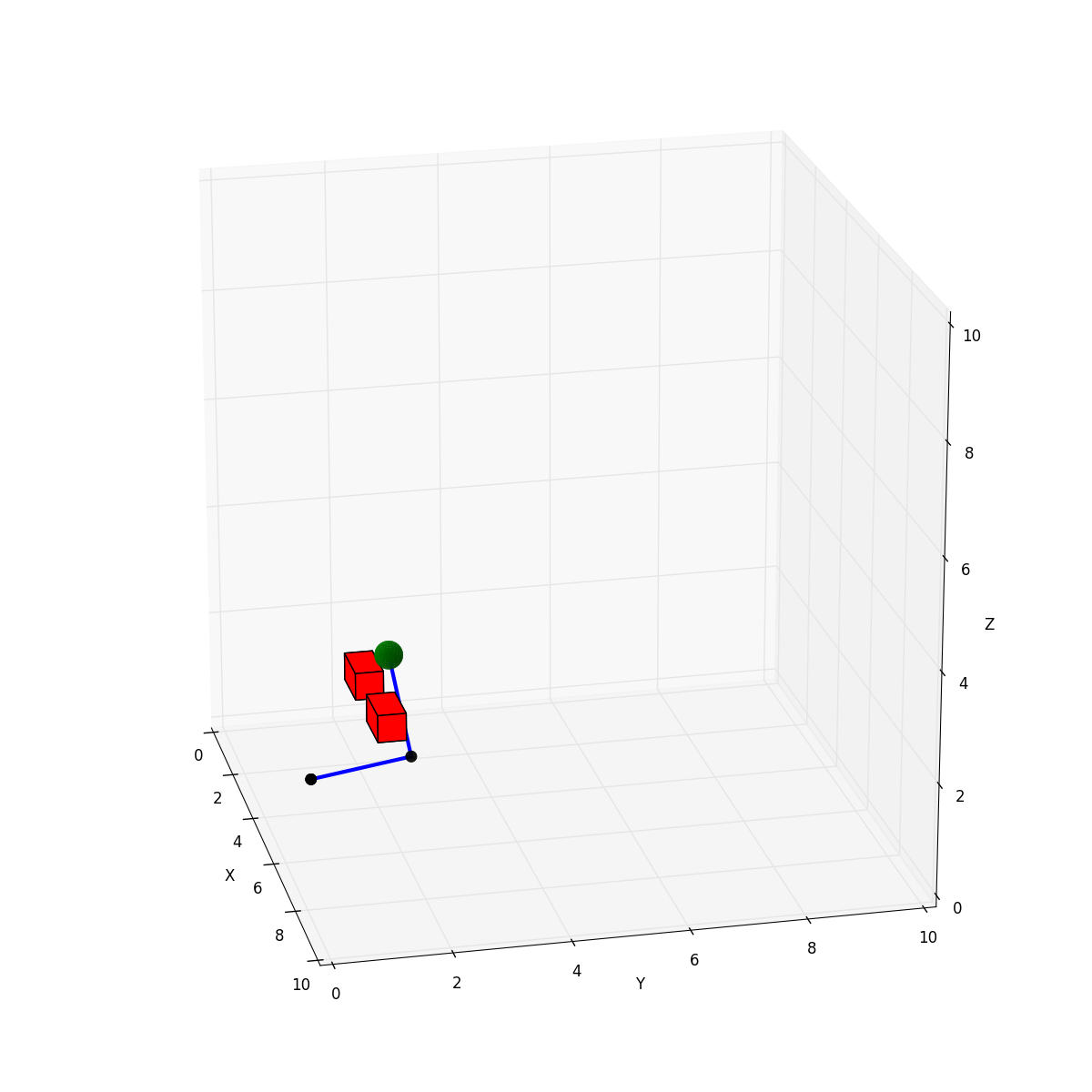
- Simulation Environment (with objects like Balls, Targets, Obstacles)
- 3D Environment Animations
- 3D Arm Animations
- End Effector Position, Velocity
You can read full documentation here or check out the source on Github.
Plotted Arm with Obstacles
Animated Arm (Trained via Reinforcement Learning)